株式会社テラ・ラボ(本社:愛知県春日井市、代表:松浦 孝英)は、2022年8月9日と19〜20日、研究拠点を置く福島県南相馬市を対象に、新機体モーターグライダー(翼長16mの有人機)を使ったデータ検証を行ったことを発表しました。
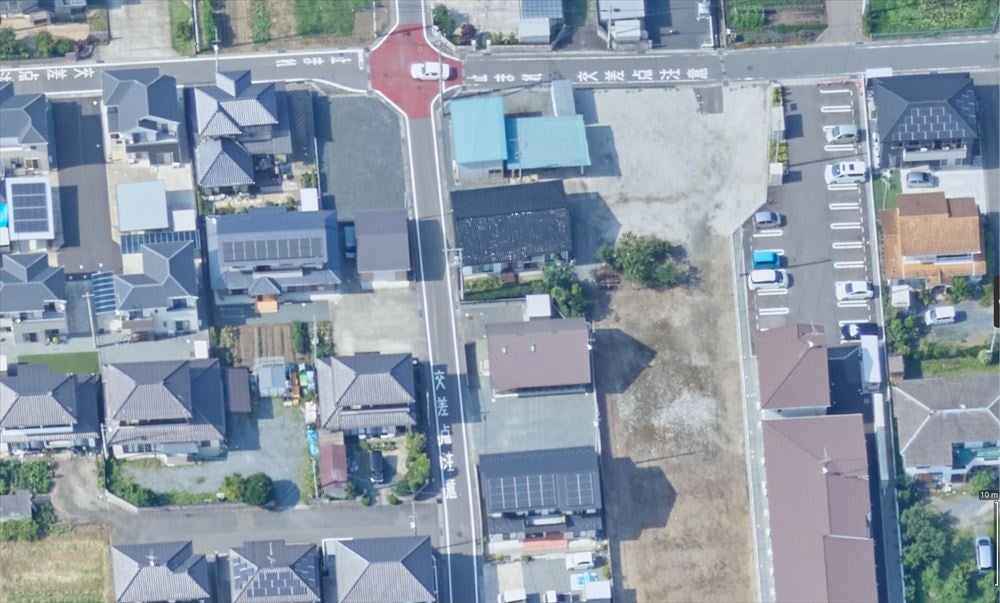
モーターグライダーによる調査は、今回が初めてで、これまでの無人航空機(4m固定翼機)よりも長時間のフライトができ、高高度から広域かつ安定したデータ(オルソ画像作成のための撮影データ/3次元化するために必要なLiDARによる点群データ)を取得することができました。
近年も集中豪雨や土砂災害、噴火など自然災害が頻発しているなか、このモーターグライダーを導入することにより、1回のフライトで、より広域な被災現場周辺のデータ取得が期待できるほか、高精度の「共通状況図=COP」の作成・迅速な解析・提供にもつながります。テラ・ラボは今秋から、愛知県内などでもモーターグライダーを中心とした実証実験を進めていくとのことです。
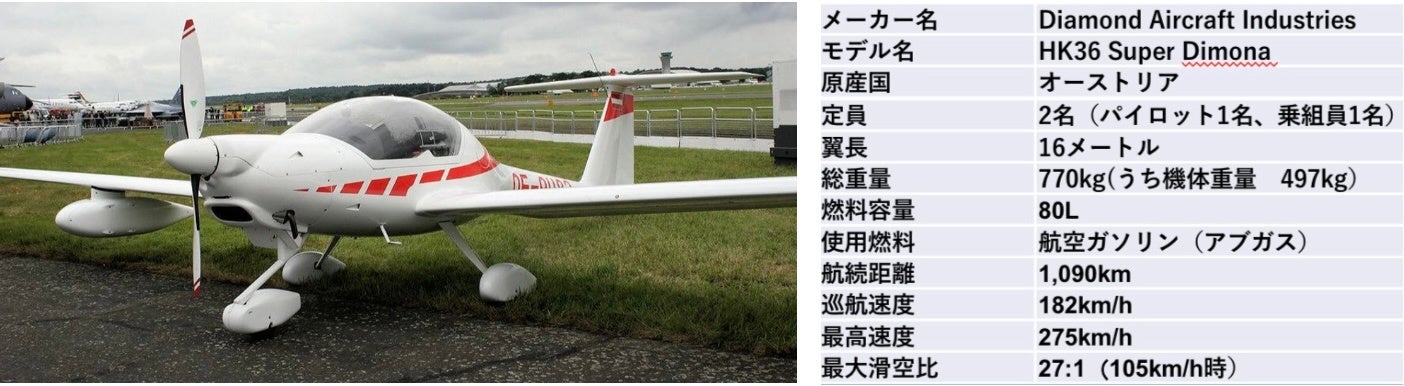
検証用有人航空機(動力滑空機)
【大規模な災害発災時における空間情報解析の研究開発】
テラ・ラボが目指す災害対策DXの実用化/事業化の際は、大型のマルチコプターを用いるか、または、本事業で開発を行っている翼長4mの長距離無人航空機に搭載したサービス提供を想定していますが、これを現時点の試作機にて行うことはリスク解消に時間を要するため、いち早いサービス提供を最優先に考え、モーターグライダー(有人機)による検証調査を行いました。
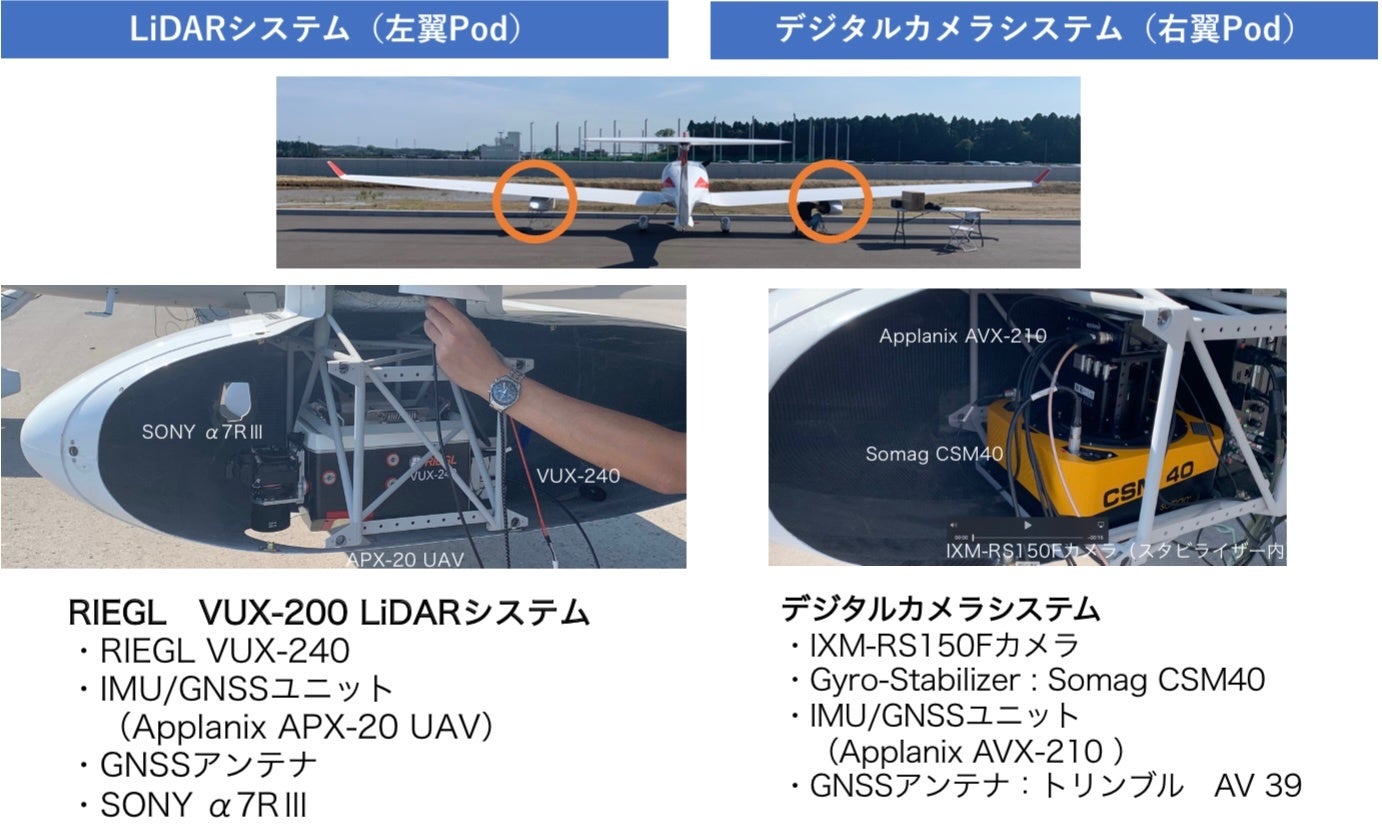
機体の観測機器用 ポッドには、点群データ取得のための機材「LiDAR(VUX-240)」と高精度なオルソ画像作成のための撮影機材「Phase One 150MP」 を搭載。大規模災害など広域データの取得に適しています。近い将来、この有人機を無操縦者航空機として操作できるよう、実証実験を進めていくとのことです。
福島県南相馬市でのモーターグラーダーによるデータ収集検証
調査目的
テラ・ラボは、モーターグライダーに最先端の小型観測装置を搭載し、災害発生時のタイムラインに最も最適なデータ解析方法を模索しています。
災害発生時は、刻々と変わる被害状況をより迅速に把握する必要があります。これまでの航空機や固定翼機によるデータ収集は、飛行や取得後の解析などに時間を要したことから、災害対策本部へのデータ提供が遅いという課題がありました。そこで、テラ・ラボは、今回の実証実験を踏まえた計測(高精度写真やLiDARのシステムを駆使)をもとに、以下の時間短縮の検証を進めます。
- 飛行計画時間の短縮化(発災前から情報収集をし、飛行計画を立てる)
- 離陸準備が整うまでの時間を短縮するため、格納庫から滑走路までの準備時間を短縮化
- データ収取時間の短縮化を図るため、高精度カメラとLiDARの特性を活かす一方で、不要なデータを間引くなどデータ最適化を図る
- 飛行終了後のデータ解析時間を短縮するため、重要な要素を切り出した解析を重点的に行い、災害対策本部のタイムラインに合わせたデータ共有のあり方を見直す
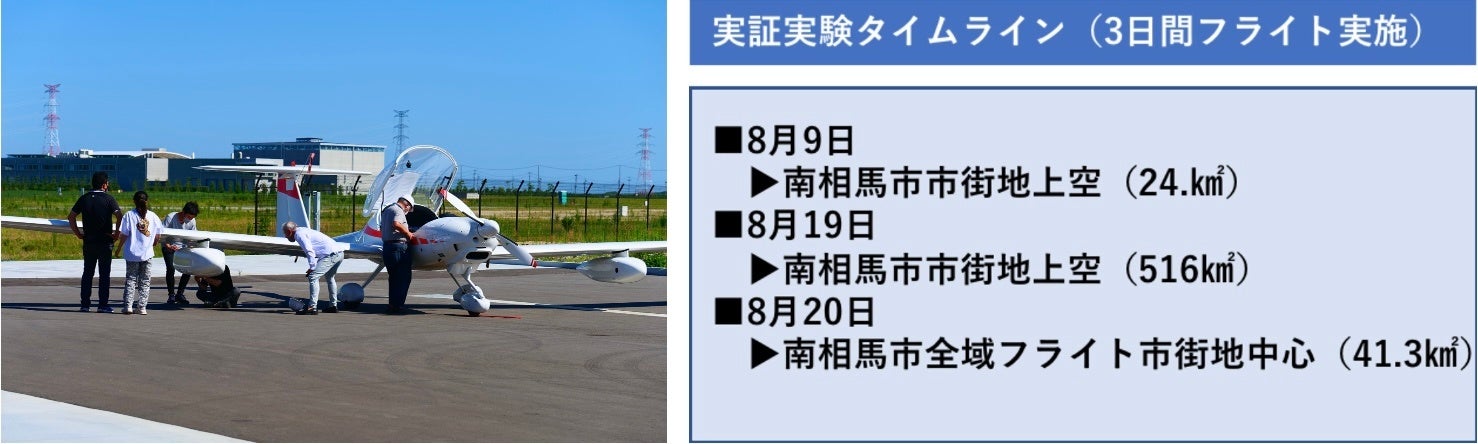
【福島県南相馬市でのモーターグラーダーによるデータ収集検証】
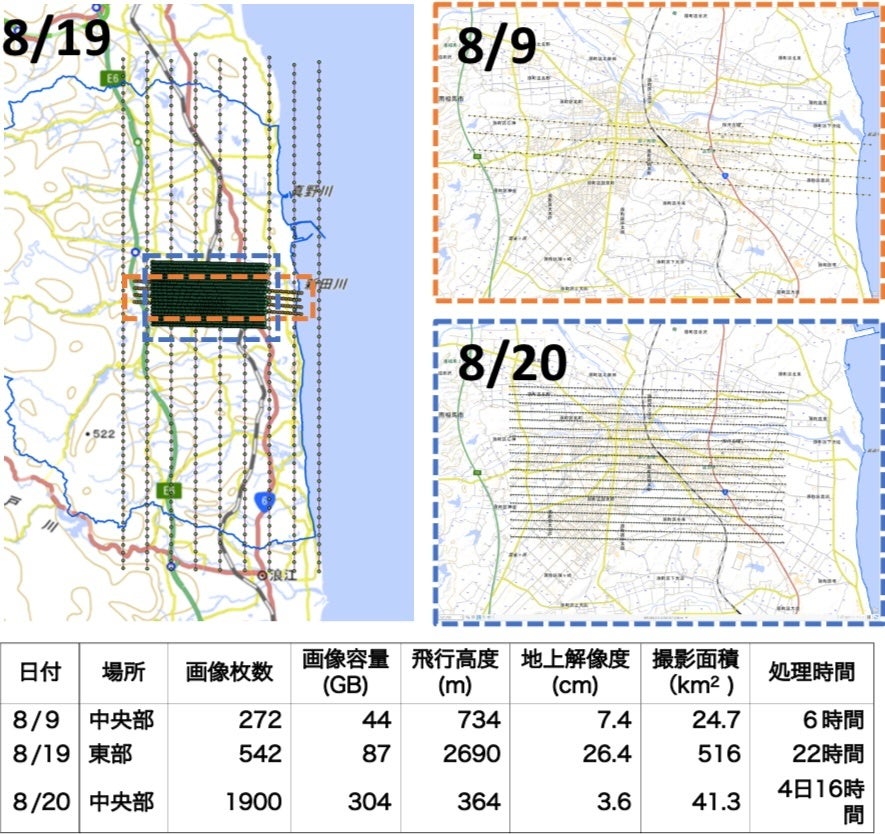
8月9日:飛行高度734m、地上解像度7.4㎝、撮影面積24.7㎢

8月19日:飛行高度2690m、地上解像度26.4㎝、撮影面積516㎢


8月20日:飛行高度364m、地上解像度3.6㎝、撮影面積41.3㎢


出典:株式会社テラ・ラボ